非接触式Chucking的功能
它使用与Bernoulli方法不同的开发的非接触吸附技术。
供应压力和吸力压力之间的平衡使得无需接触和低压力的工件就可以抓住工件。
非接触吸附技术
●稳定的飞行特征:支持工件的流体膜的稳定性是气体轴承本身。没有振动。
●低空气消耗:空气供应和吸力都可以达到高效率,从而降低了空气消耗。
●好的安静:气流常慢。没有操作噪音,也没有灰尘升起。
高精度
●间隙调整:可以通过结合供应压力和吸力压力来调整差距。
●高精度:浮动间隙均匀地与吸附表面均匀。工件在高度精确的平面上受支持。
高基本表现
●低压力:整个工件都由流体膜支撑。保留是统一的。它不会强调工作。
●强烈的握力:尽管它是非接触的,但它提供了与真空吸力杯相当的抓地力。
●清洁:没有与工件接触。渗透多孔体的液体干净。
非接触式chuck的概述
流体静态的稳定倾斜特征和真空吸力的预压效应可实现低压力和*的抓地力。
吹扫 +真空=非接触式chuck!
崛起如何运作
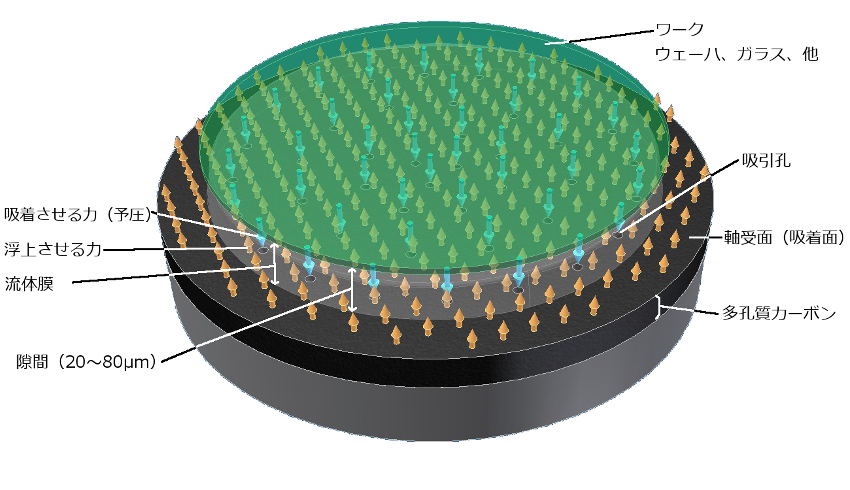
非接触式Chucking基于使用碳多孔体的静压气体轴承的技术。所提供的压力流过多孔体,并均匀地从整个轴承表面流出。工件从轴承表面上升起,并带有较小的间隙,从而使其变得流畅。
非接触的工作方式
在非接触式旋转中,在气体轴承的轴承表面上提供了微孔,并连接真空源以吸收它。浮动的力和吸附的力是同时在同一平面上产生并保持平衡的,从而产生了非接触的吸附状态。目前,吸附力创造了凝固流体膜的效果,从而提高了工件的稳定性。
高精度的工作方式
该工件一直处于非接触式吸附状态,由流体膜均匀地支撑而没有不均匀的负载,并且在保持恒定间隙的同时,它遵循轴承表面,形成精确的平面。工件保持在无压力,自然状态,不会在高度方向上引起位移或振动。
非接触式视频
●演示
●φ200mm晶圆处理
应用的示例
硅晶圆 chuck桌 | 硅晶圆 材料处理末端效应器 | 玻璃板检查台 |
φ200mm兼容 | φ200mm兼容 | 500x400mm |
φ300mm兼容 | φ300mm兼容 | - |
产品规格
| 用途 | chuck桌 | 最终效应器 | 玻璃 | ||
|---|---|---|---|---|---|
| 合适的工件尺寸 | φ200mm | φ300mm | φ200mm | φ300mm | 500x400mm |
| 模型 | PC3CSA-215-ACNA | PC3CSA-315-ACNA | PC3CFA-215-ACNA | PC3CFA-315-ACNA | PC3SSA-500/400 |
| 使用的流体 | 空气,氮 | 空气,氮 | 空气,氮 | 空气,氮 | 空气,氮 |
| 空气供应压力 | 〜0.5MPA | 〜0.5MPA | 〜0.3MPA | 〜0.3MPA | 〜0.2MPA |
| 空气消耗 | 〜17L/min | 〜33L/min | 13L/min(0.2MPA) | 29L/min(0.2MPA) | 47L/min(0.2MPA) |
| 吸力压力 | 〜-0 。 1MPA | 〜-0 。 1MPA | 〜-0 。 1MPA | 〜-0 。 1MPA | 〜-0 。 1MPA |
| 吸力位移 | 53L/min ( -30KPA) | 138L/min ( -30KPA) | 36升/分钟( -10KPA) | 52L/min ( -10KPA) | 90L/min ( -15kpa) |
| 平坦 | 3μm | 13μm | 28μm | 31μm | 11.8μm |
| 连接孔直径 | 空调M5 x 2,吸力RC1/8 x 2 | 空调M5 x 2,吸力RC1/4 x 4 | 空气供应M5 x 1,吸力M5 x 2 | 空气供应M5 x 1,吸力M5 x 2 | 供应RC1/4X1,供应RC3/8x2 |
| 尺寸 | 外径φ225mmx厚度41mm | 外径φ325mmx厚度46mm | 外径φ225mmx厚度7.4mm | 外径φ325mmx厚度7.4mm | 550 x 450 x 32 |
| 重量 | 3.7公斤 | 8.2公斤 | 336克 | 683克 | 17.5kg |
| 大气温度 | 23±2℃ | 23±2℃ | 23±2℃ | 23±2℃ | 23±2℃ |
| 气压 | 气压 | 气压 | 气压 | 气压 | 气压 |
